Crop stress detection from UAVs: best practices and lessons learned for exploiting sensor synergies
Erekle Chakhvashvili, Miriam Machwitz, Michal Antala, Offer Rozenstein, Egor Prikaziuk, Martin Schlerf, Paul Naethe, Quanxing Wan, Jan Komárek, Tomáš Klouček, Sebastian Wieneke, Bastian Siegmann, Shawn Kefauver, Marlena Kycko, Hamadou Balde, Veronica Sobejano Paz, Jose A. Jimenez-Berni, Henning Buddenbaum, Lorenz Hänchen, Na Wang, Amit Weinman, Anshu Rastogi, Nitzan Malachy, Maria-Luisa Buchaillot, Juliane Bendig Uwe Rascher
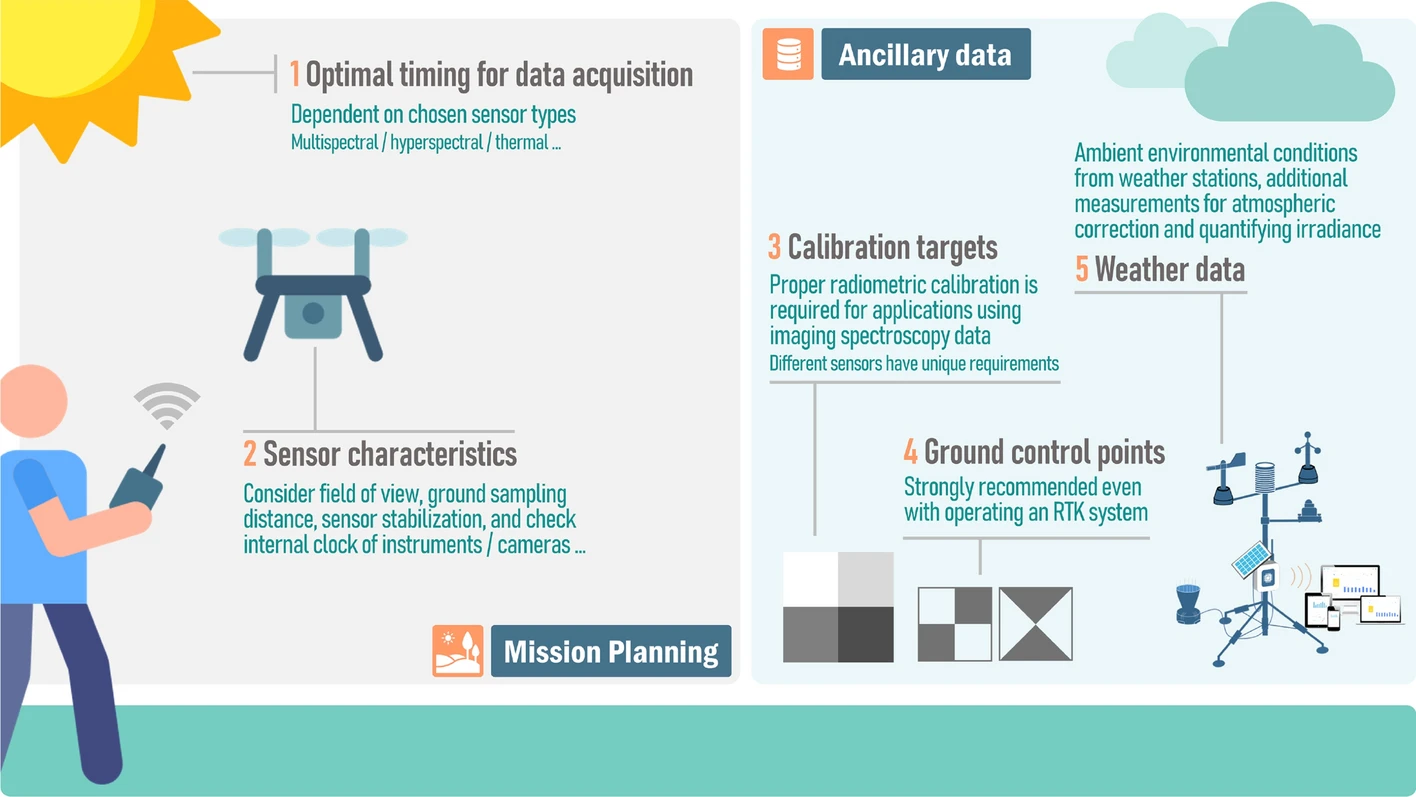
Introduction Detecting and monitoring crop stress is crucial for ensuring sufficient and sustainable crop production. Recent advancements in unoccupied aerial vehicle (UAV) technology provide a promising approach to map key crop traits indicative of stress. While using single optical sensors mounted on UAVs could be sufficient to monitor crop status in a general sense, implementing multiple sensors that cover various spectral optical domains allow for a more precise characterization of the interactions between crops and biotic or abiotic stressors. Given the novelty of synergistic sensor technology for crop stress detection, standardized procedures outlining their optimal use are currently lacking. Materials and methods This study explores the key aspects of acquiring high-quality multi-sensor data, including the importance of mission planning, sensor characteristics, and ancillary data. It also details essential data pre-processing steps like atmospheric correction and highlights best practices for data fusion and quality control. Results Successful multi-sensor data acquisition depends on optimal timing, appropriate sensor calibration, and the use of ancillary data such as ground control points and weather station information. When fusing different sensor data it should be conducted at the level of physical units, with quality flags used to exclude unstable or biased measurements. The paper highlights the importance of using checklists, considering illumination conditions and conducting test flights for the detection of potential pitfalls. Conclusion Multi-sensor campaigns require careful planning not to jeopardise the success of the campaigns. This paper provides practical information on how to combine different UAV-mounted optical sensors and discuss the proven scientific practices for image data acquisition and post-processing in the context of crop stress monitoring.
OPEN ACCESS
https://link.springer.com/article/10.1007/s11119-024-10168-3